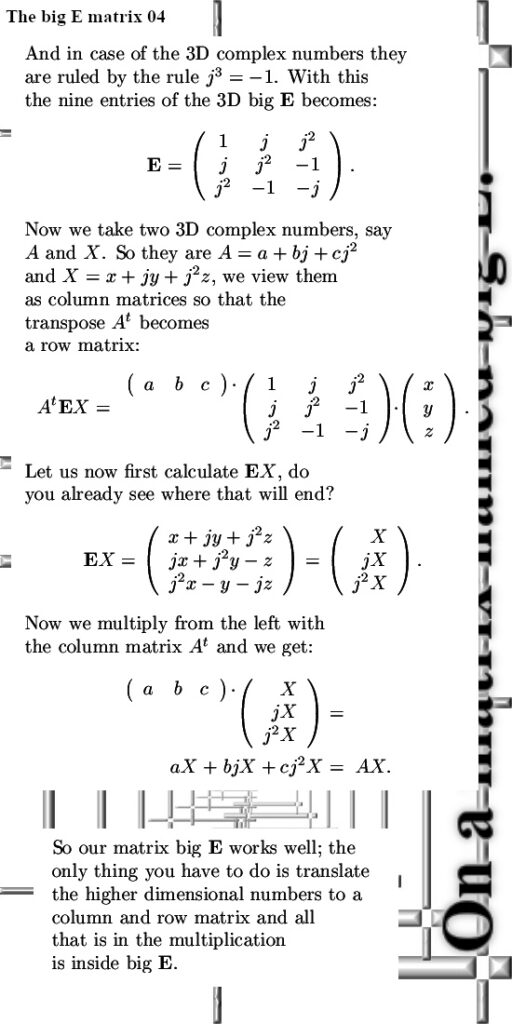
On this entire website when I talked about a matrix representation it was always meant as a representation that mimics the multiplipaction on a particular space as say the 3D complex numbers. And making such matrices has the benefit you can apply all kinds of linear algebra like matrix diagonalization, or finding eigenvalues (the eigenvalue functions) and so on and so on. So the matrix representation was always the representation of a higher dimensional number.
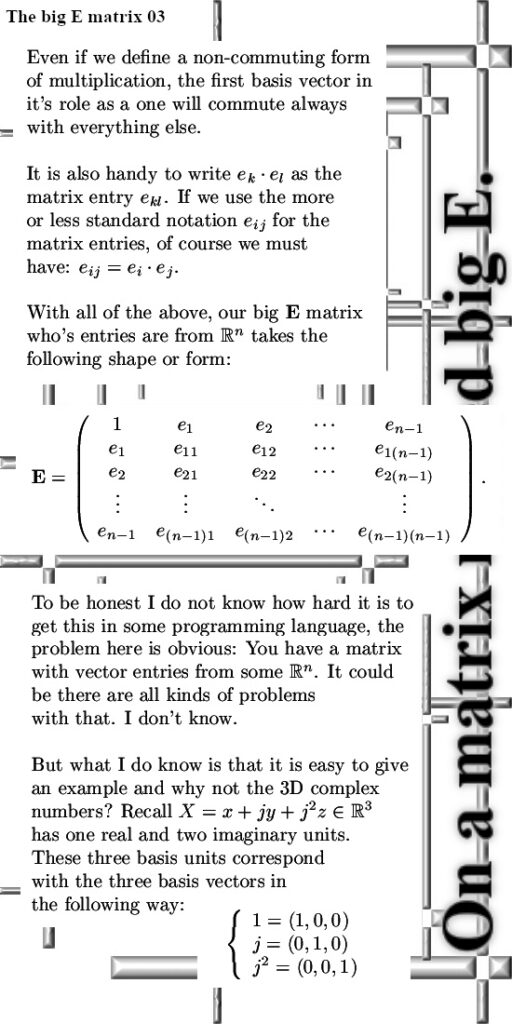
Big E is very different, this matrix describes the multiplication itself. As such it contains all possible products of two basis vectors and since this is supposed general theory I wrote it in the form of an nxn matrix. For people who like writing computer code, if you can implement this thing properly you can make all kinds of changes to the multiplication. As a matter of fact you can choose whatever you want the product of two basis vectors to be. So in that sense it is much more general as just the complex or the circular multiplication.
I do not like writing computer code myself that much but I can perfectly understand people who like to write that. After all every now and then even I use programs like PARI and without people that like to write code such free programs are just not there.
The math in this post is highly descriptive, it is the kind of math that I do not like most of the time but now I finally wrote this matrix down it was fun to do. If you are just interested in some fixed number space as say the 3D or 4D complex numbers, this concept of big E is not very useful. It is handy when you want to compare a lot of different multiplication in the same dimension and as such it could be a tool that comes in handy.
The entries of this matrix big E are the products of two basis vectors so this is very different from your usual matrix that often only contain real numbers or in more advanced cases complex numbers from the complex plane. I think it could lead to some trouble if you try to write code where the matrix entries are vectors, an alternative would be to represent big E as n square nxn matrices but that makes it a bit less overseeable.
May be in linear algebra you have seen so called quadratic forms using a symmetric matrix. It is a way to represent all quadratic polymonials in n variables. Big E looks a lot like that only you now have vectors as entries.
I did choose the number 1 to be the very first basis vector, so that would give the real line in that particular space. Of course one of the interesting details is that all analytic functions that you know from the real line can easily be extended to all other spaces you want. For example the sine and cosine or the exponential function live in all kinds of spaces in all kinds of dimensions. As such it is much much broader as only a sine on the real line and the complex plane.
This post is five pictures long each 550×1100 pixels. I made them a bit larger because I use a larger font compared to a lot old posts. There are hardly mathematical results in this post because it is so descriptive. Compare it to the defenition of what a group is without many examples, the definition is often boring to read and only comes alive when you see good examples of the math involved.
If you want to try yourself and do a bit of complex analysis on higher dimensional spaces, ensure your big E matrix is symmetric. In that case the multiplication commutes, that is AB = BA always. If you also ensure all basis vectors are invertible you can find the so called Cauchy-Riemann equations for your particular multiplication. Once you have your set of CR equations you can differentiate all you want and also define line integrals (line integral are actually along a curve but that does not matter).
A simple counter example would the 4D quaternions, they do not commute and as such it is not possible to conduct any meaningful complex analysis on the space of quaternions.
End of this post and thanks for your attention.